Factors to Consider:
The major variation that I made for my first round with this circuit is that I used the USB cord for a power supply which may cause soft-iron effects. I do not yet have the non-magnetic batteries to hook up to my circuit. Additionally, I used the compass in my computer room and next to my home circuit breaker box which may introduce noise into my system.
Initial Impressions:
When using the circuit I had a few major initial impressions:
Data Collected:
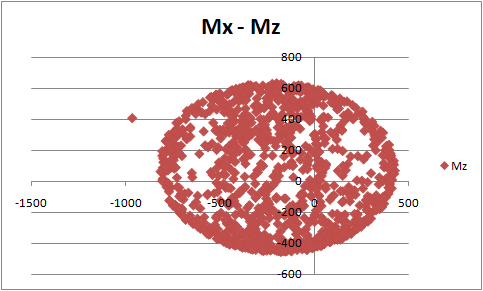
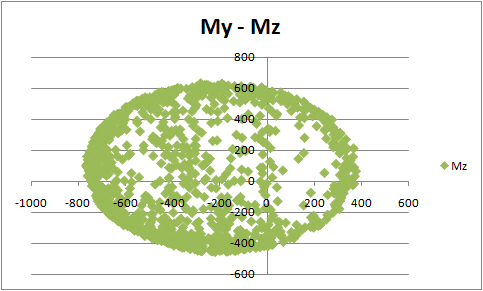
I collected a set of over 1,000 points of magnetometer data while moving the compass randomly around in 3-d space. The results are as follows:
The major variation that I made for my first round with this circuit is that I used the USB cord for a power supply which may cause soft-iron effects. I do not yet have the non-magnetic batteries to hook up to my circuit. Additionally, I used the compass in my computer room and next to my home circuit breaker box which may introduce noise into my system.
Initial Impressions:
When using the circuit I had a few major initial impressions:
- The heading jumps a lot, even when not moving. Decreasing the refresh time from 100 to 500 seemed to eliminate this jumping entirely.
- The heading is only output in integer format (rounded to the nearest degree).
- The heading varies wildly when tilted but still facing in the same heading.
- My library does not include a pre-coded function to output tilt in degrees but I can use the function included later.
Data Collected:
I collected a set of over 1,000 points of magnetometer data while moving the compass randomly around in 3-d space. The results are as follows:
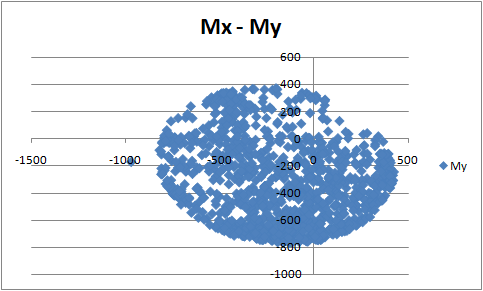
The following values were the max and min for each discreet sensor:
Mx-max: 426 My-max: 374 Mz-max: 634
Mx-min: -968 My-min: -766 Mz-min: -455
Mx-max: 426 My-max: 374 Mz-max: 634
Mx-min: -968 My-min: -766 Mz-min: -455
Data Take-Aways:
From the 2-d plots of our compass data it is clear that our data is neither centered nor round. This compass is badly in need of calibration to adjust the offsets for determining our heading. It is highly possible that this is driving our compass errors.
Another factor that has not yet been explained is that there is an x-y point which falls vastly outside the ellipse. This is either an erroneous reading, or some sort of magnetic interference.
Next Steps:
From the 2-d plots of our compass data it is clear that our data is neither centered nor round. This compass is badly in need of calibration to adjust the offsets for determining our heading. It is highly possible that this is driving our compass errors.
Another factor that has not yet been explained is that there is an x-y point which falls vastly outside the ellipse. This is either an erroneous reading, or some sort of magnetic interference.
Next Steps:
- Calibrate the compass using the routines provided in the sketch file.
- Calculate the device tilt.
- Smooth out the jittery heading output.
